Researchers Daniel Menges and Adil Rasheed, affiliated with the University of Lübeck, have published groundbreaking research on the role of digital twins in advancing autonomous surface vessels (ASVs). Their work, titled “Digital Twin for Autonomous Surface Vessels: Enabler for Safe Maritime Navigation,” explores how digital twins (DTs) can enhance the safety and efficiency of maritime operations by providing a robust framework for simulations and real-time decision-making.
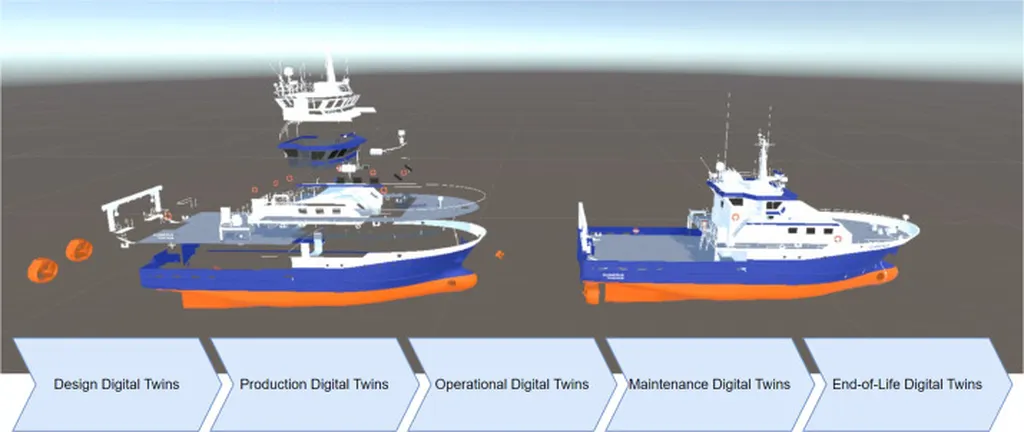
In their study, Menges and Rasheed delve into the various levels of digital twin complexity, ranging from Level 0 to Level 5. Level 0, or the Standalone level, employs offline modeling techniques to create a basic digital representation of the vessel. Moving up, Level 1, known as the Descriptive level, integrates sensors and online modeling to improve situational awareness. This integration allows for real-time data collection and analysis, providing a more accurate picture of the vessel’s operational environment.
Level 2, the Diagnostic level, focuses on condition monitoring and cybersecurity. This level ensures that the vessel’s systems are operating optimally and securely, identifying potential issues before they escalate. Level 3, or the Predictive level, incorporates predictive analytics to forecast future scenarios and assess the vessel’s life endurance. This predictive capability allows for proactive maintenance and strategic planning, enhancing the vessel’s longevity and performance.
Level 4, the Prescriptive level, embeds decision-support systems that provide actionable insights and recommendations. This level supports complex decision-making processes, ensuring that the vessel operates efficiently and safely. Finally, Level 5, the Autonomous level, enables advanced functionalities such as collision avoidance and path following. This highest level of digital twin complexity allows for near-complete autonomy, significantly reducing the need for human intervention.
The researchers emphasize that digital twins continuously update with real-time sensor data, effectively correcting modeling errors and enhancing decision-making processes. This continuous improvement loop ensures that the digital twin remains accurate and reliable, providing valuable insights into the vessel’s current state and operational efficiency.
Menges and Rasheed’s comprehensive methodology for establishing a digital twin framework tailored for ASVs offers valuable recommendations for future research and development. By exploring existing state-of-the-art enablers across the defined levels, they provide a roadmap for advancing the field of autonomous maritime navigation. Their work highlights the critical role of digital twins in enabling complex autonomous systems, paving the way for safer, more sustainable maritime operations.
The practical applications of this research are vast. For instance, digital twins can be used to simulate various maritime scenarios, allowing operators to test and refine navigation strategies without risking real-world assets. This capability is particularly valuable in high-risk environments, where real-time decision-making can prevent accidents and minimize environmental impact.
Furthermore, the integration of digital twins with autonomous surface vessels can enhance fleet management and coordination. By providing a centralized platform for monitoring and controlling multiple vessels, digital twins can optimize routing, reduce fuel consumption, and improve overall operational efficiency. This integration can also facilitate better communication and collaboration between vessels, ensuring safer and more coordinated maritime operations.
In conclusion, the research by Daniel Menges and Adil Rasheed underscores the transformative potential of digital twins in the maritime industry. Their work not only advances our understanding of digital twin technology but also provides a clear path forward for its application in autonomous surface vessels. As the maritime industry continues to evolve, the insights and recommendations offered by Menges and Rasheed will be instrumental in shaping the future of safe and sustainable maritime navigation. Read the original research paper here.