In a significant stride towards enhancing maritime safety, researchers have developed a novel decision-making method for intelligent ships navigating complex intersection waters. The study, led by Guojing Yue from the Navigation College at Dalian Maritime University in China, introduces a cooperative collision avoidance system driven by enhanced large language models (LLMs). Published in the journal ‘Zhongguo Jianchuan Yanjiu’, which translates to ‘Chinese Journal of Ship Research’, this research promises to revolutionize how ships avoid collisions in busy, intersecting waterways.
So, what’s the big deal? Well, imagine a bustling intersection, but instead of cars, you’ve got ships. It’s chaotic, right? Now, imagine if these ships could talk to each other, share their intentions, and make decisions together to avoid collisions. That’s essentially what this new method does. It’s like giving ships a sort of ‘maritime etiquette’ to follow, ensuring safe and efficient navigation.
The method formulates the multi-ship collision avoidance problem as a partially observable Markov decision process (POMDP), providing a solid mathematical foundation for decision-making. The process is broken down into four modules: state perception, intent sharing, conflict coordination, and avoidance decision. This structured approach ensures that information flows smoothly and reasoning is sound.
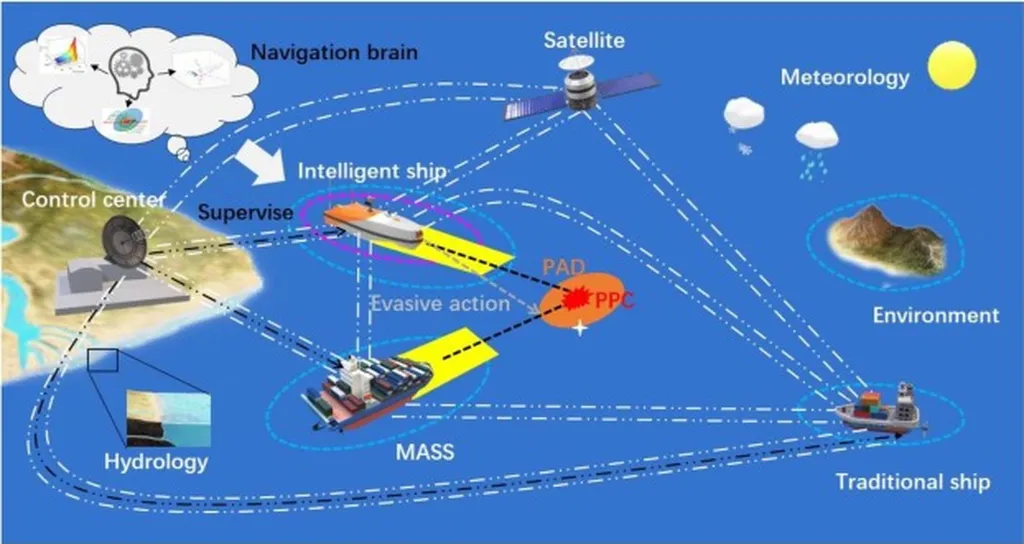
One of the most innovative aspects of this research is the proposed central-distributed dual-layer architecture. At the central layer, an LLM-based coordinator aggregates data from all ships, applicable navigation rules, and conflict severity metrics to determine the order in which ships should pass. At the distributed layer, individual ship agents use LLMs and chain-of-thought prompt engineering to perform stepwise reasoning. They synthesize scene descriptions, coordination directives, and retrieved navigation experience to generate executable avoidance maneuvers.
To address the limitations of LLMs, such as precise numerical computation and continual learning, the architecture incorporates two augmentation mechanisms. A lightweight mathematical engine updates kinematic states and computes deterministic conflict metrics, providing rigorous quantitative inputs. A retrieval-augmented generation (RAG) navigation knowledge base integrates static navigation rules with dynamic historical data, enabling case-based grounding and continuous learning.
The results are promising. Simulation experiments demonstrated that the proposed method achieves safe and efficient cooperative collision avoidance in typical intersection scenarios involving two, three, and four ships. The system maintains a minimum maneuvering speed exceeding 3 knots and ensures a safety margin greater than twice the ship length.
So, what does this mean for the maritime industry? For starters, it could significantly reduce the risk of collisions in busy waterways, enhancing safety for both crew and cargo. It also paves the way for highly autonomous shipboard AI, which could lead to more efficient navigation and reduced human error. Moreover, the use of LLMs in maritime decision-making opens up new avenues for innovation and technological advancement in the sector.
As Guojing Yue puts it, “This method advances the engineering application of LLMs in maritime decision-making and provides a new pathway for realizing highly autonomous shipboard artificial intelligence in complex operational environments.”
In essence, this research is a beacon of progress in maritime technology, offering a glimpse into a future where ships navigate safely and efficiently, guided by the power of artificial intelligence. It’s an exciting time for the maritime industry, and this development is certainly a step in the right direction.