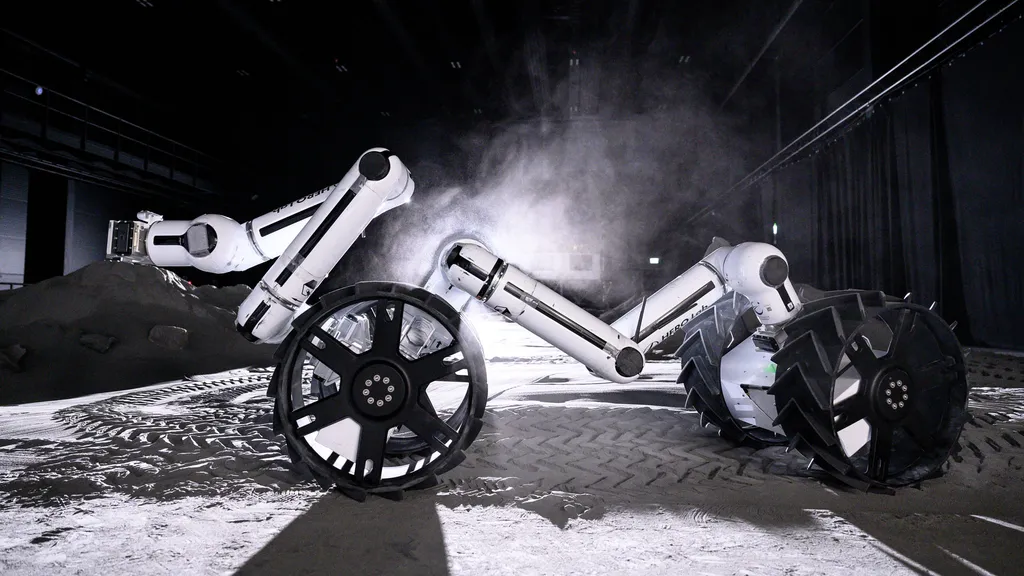
Researchers from the University of Tokyo, led by Kentaro Uno, have unveiled a groundbreaking development in lunar robotics with their modular and reconfigurable robot, dubbed MoonBot. This innovative system is designed to overcome the challenges of lunar payload constraints while adapting to the diverse environmental conditions and task requirements on the Moon’s surface.
MoonBot represents a significant leap forward in robotic technology tailored for extraterrestrial construction and exploration. The robot’s modular design allows for on-demand reconfiguration, enabling it to perform a wide range of tasks essential for establishing lunar infrastructure. This adaptability is crucial for operations such as civil engineering, transporting and deploying infrastructural components, and assisting with inflatable modules.
The development of MoonBot is driven by the need to maximize functionality within the stringent mass limitations of lunar payloads. The researchers have meticulously engineered the robot to be versatile, ensuring it can handle the varied demands of lunar missions. The preliminary field demonstrations have validated the proof of concept, showcasing MoonBot’s capability to execute critical tasks that simulate the establishment of lunar infrastructure.
During the testing phase, the researchers focused on refining the connector design, which is pivotal for the robot’s modularity and reconfigurability. The lessons learned from these tests provide valuable insights for the future advancement of modular robotic systems destined for lunar missions. The successful execution of tasks such as infrastructural component transportation and deployment, as well as assistive operations with inflatable modules, highlights MoonBot’s potential to revolutionize lunar base construction.
The implications of MoonBot’s development extend beyond lunar exploration. The modular and reconfigurable nature of the robot offers a blueprint for future robotic systems designed for other planetary missions. By leveraging local resources and adapting to different environmental conditions, MoonBot sets a precedent for sustainable and efficient extraterrestrial construction and exploration.
In summary, the introduction of MoonBot by researchers at the University of Tokyo marks a significant milestone in the field of lunar robotics. Its modular and reconfigurable design, coupled with successful preliminary demonstrations, positions MoonBot as a key player in the future of lunar base construction and beyond. The insights gained from its development and testing will undoubtedly pave the way for advancements in modular robotic systems, ensuring their readiness for the challenges of space exploration. Read the original research paper here.