In a significant stride towards enhancing road safety and energy efficiency in electric vehicles (EVs), researchers have developed a novel reinforcement learning (RL) approach for adaptive cruise control (ACC). The study, led by Assem Meghawer from the Mechanical Engineering Department at the Arab Academy for Science and Technology and Maritime Transport (AASTMT) Smart-Village Branch, was recently published in Scientific Reports, which translates to Scientific Reports in English.
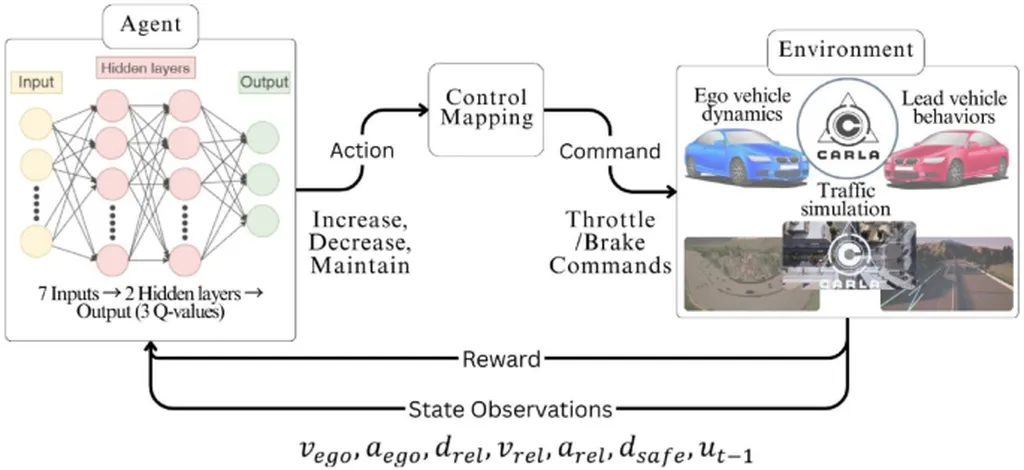
Adaptive cruise control is a system that automatically adjusts a vehicle’s speed to maintain a safe distance from the car in front. While traditional ACC systems struggle with complex driving environments, the team’s approach reformulates the control structure to simplify the decision-making process. By unifying throttle and brake actions into a single scalar variable within a discrete action space, the system mimics human-like driving behavior and improves training stability.
The researchers integrated multi-step returns with a Double Deep Q-Network (Double-MS DQN) architecture to accelerate convergence and enhance policy stability. They also implemented a stochastic scenario generator to expose the agent to varied and unpredictable lead-vehicle behaviors during training and evaluation.
The results, conducted in the CARLA simulator, showed that the proposed approach achieved significantly faster convergence, reducing training episodes by up to 73%, and reduced headway errors by over 40% compared to standard DQN, Dueling DQN, and Double DQN.
“This work demonstrates that adapting the RL control formulation enables high-performance learning with lightweight, scalable algorithms delivering safer and smoother control in practice,” said Meghawer.
The implications for the maritime sector are substantial. As the industry increasingly adopts electric and autonomous vessels, advanced ACC systems can enhance safety and efficiency in maritime transportation. The technology can be adapted for collision avoidance systems, berthing assistance, and autonomous navigation, reducing the risk of accidents and improving operational efficiency.
Moreover, the commercial impact of this research extends beyond the maritime sector. The automotive industry stands to benefit significantly from improved ACC systems, leading to safer roads and more energy-efficient vehicles. The technology can also be applied to other areas where autonomous control is crucial, such as drones and robotics.
In summary, the research by Meghawer and his team represents a significant advancement in the field of adaptive cruise control, with far-reaching implications for both the automotive and maritime industries. The integration of reinforcement learning and advanced control algorithms offers a promising solution to the challenges faced by traditional ACC systems, paving the way for safer and more efficient transportation.